전체
반도체
반도체소재부품
반도체장비
차/전력반도체
후공정/기판
2차전지
2차전지소재
2차전지장비
폐배터리
자동차
자동차부품
디스플레이
전기전자
수소
신재생에너지
원자력
에너지/원자재
5G/통신
자율주행
AI/AR/VR
로봇
항공/우주/방위
UAM
철강
비철금속
화장품/유통
여행/카지노
음식료
의류신발
폐기물
플라스틱
미용/의료기기
조선/해운
인터넷/보안
게임
엔터/미디어
정유/화학
건설
기계/유틸
투자관련
경제/통계
기타
2025.4Q 분기별 매출액 성장 2025.4Q 분기별 영업이익 성장 2025.4Q 분기별 수주잔고 성장 2025.4Q 8주에 80%이상 상승 2025.4Q 신저가대비 100%이상 상승 2025.4Q 50일신고가+신저가대비 70%이상 2025.4Q 2주에 15%이상 하락 2025.4Q 반등강도(30~40)
2025.4Q 분기별 매출액 성장 2025.4Q 분기별 영업이익 성장 2025.4Q 분기별 수주잔고 성장 2025.4Q 8주에 80%이상 상승 2025.4Q 신저가대비 100%이상 상승 2025.4Q 50일신고가+신저가대비 70%이상 2025.4Q 2주에 15%이상 하락 2025.4Q 반등강도(30~40)
2022.07.07
로봇센서의 분류 - 센서의 구분
[IBK투자증권 김태현, 이상현] 관절튼튼 로봇팔팔
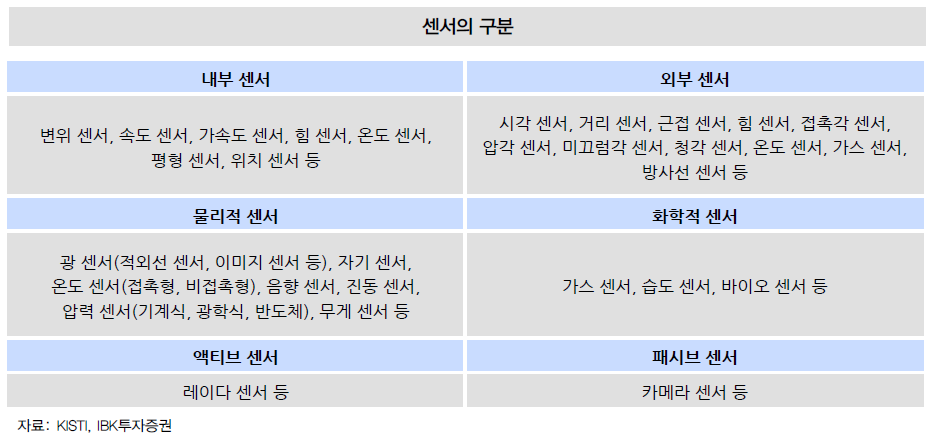
로봇 센서는 크게 내부/외부 센서, 물리적/화학적 센서, 그리고 액티브/패시브 센서 등으로 구분 가능
1) 내부 센서: 로봇 내부 상태에 관한 여러가지 물리량을 계측하는 것으로 구동변위나 속도 및 힘(토크), 로봇의 자세, 내부온도 검출등을 수행
2) 외부 센서: 대상으로 하는 물체나 환경에 관한 물리량을 계측하고 인식하는 기능. 로봇 자체의 위치의 계측과 대상의 존재 확인 및 위치/방향/속도 등의 계측, 그리고 대상 물체의 식별을 통한 인식수행이 그 역할임
3) 물리적 센서: 빛, 전기, 자기, 열, 소리, 힘 등을 검출하여 전기적 신호로 바꾸는 센서
4) 화학적 센서: 기체, 액체 상태의 화학성분 등을 검출하여 전기적 신호로 바꾸는 센서
5) 액티브 센서: 레이더 기반의 활성 센서 등을 말함. 참고로 레이더 센서는 전자기파를 발사시켜, 어떤 물체(표적)에 부딪혀 나온 반사파 또는 후방 산란파에 의해, 그 물체(표적)의 존재유무/거리/고도/이동 방향/이동 속도/식별/분류 등을 하기 위한 무선 전파 탐지,거리 계측, 레이더 이미지 생성 장치임
6) 패시브 센서: 카메라 센서와 같이 수동 센서 등을 말함. 참고로 카메라 센서는 피사체의 광학 상을 전기 신호로 변환
관련 목록